Gần đây, những robot siêu nhỏ đang được rất nhiều sự quan tâm của các nhà khoa học. Đó là những cỗ máy có thể di chuyển tự do trong mạch máu, vận chuyển các loại thuốc đặc hiệu cho tế bào ung thư, tháo gỡ các khối máu đông, thậm chí thực hiện các tiểu phẫu trong cơ thể chúng ta. Các nhà nghiên cứu đang thiết kế các robot siêu nhỏ, còn gọi là microswimmers, chúng có thể thực hiện tất cả những điều này và nhiều hơn thế nữa [1].
Cơ thể con người được cấu tạo phần lớn từ các dịch thể. Máu, tủy sống và các thể dịch khác tạo nên 60 đến 65 phần trăm thể tích cơ thể. Vì thế để có thể di chuyển trong cơ thể người dễ dàng, robot buộc phải “bơi”. Tuy nhiên việc tìm ra những vật liệu thích hợp và thiết kế để robot có thể bơi trong những mạch máu là vấn đề không đơn giản [1].
Để tìm ra giải pháp cho các vấn đề, các nhà nghiên cứu thường tìm các ý tưởng từ tự nhiên. Đặc biệt là từ các loài ký sinh trùng, những chuyên gia trong việc xâm nhập vào các cơ thể sống. Nelson, một nhà nghiên cứu về robot tại Swiss Federal Institute of Technology, đã tập trung nghiên cứu về Trypanosoma brucei vi sinh vật gây bệnh ngủ Châu Phi. Người mắc bệnh này thường rối loạn giấc ngủ, không ngủ được vào buổi tối.
T.brucei bơi trong dòng máu nhờ đuôi có cấu trúc giống roi được gọi là flagellum. Khi di chuyển, T.brucei đồng thời thay đổi hình dạng cơ thể. Chúng có thể thay đổi hình dạng từ dạng ngắn và tròn sang dạng thon và mảnh để có thể xuyên qua các khe hở giữa các tế bào [2]. Nelson muốn thiết kế một robot có thể thay đổi hình dạng.
Nhóm của ông đã sử dụng vật liệu là hydrogel, một vật liệu có độ bền và độ co dãn rất cao. Khi ở kích thước nhỏ, sự biến dạng của nó có thể được điều khiển thông qua cấu trúc của các lớp vật liệu khác nhau [3]. Các cấu trúc bao gồm một lớp hydrogel có cấu trúc ổn định kết hợp với lớp poly (ethylene glycol) diacrylate (PEGDA) có thể thay đổi hình dạng khi thay đổi nhiệt độ [4].
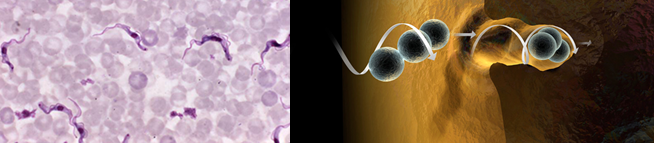
Ảnh bên trái: Trypanosoma brucei (màu tím đậm) đang bơi giữa các tế bào máu (màu tím nhạt) là đối tượng mô phỏng của Nelson. Ảnh bên phải: Các microrobot được cấu tạo từ các hạt từ đang xuyên qua thành mạch trong nghiên cứu của Kim.
Không giống hướng đi của Nelson, nhóm của Kim ở trường Đại học Southern Methodist ở Dallas đang nghiên cứu để giải quyết vấn đề năng lượng cho microrobot. Kim nhận thấy Borrelia burgdorferi, vi trùng gây nên bệnh Lyme. Loại vi khuẩn này sử dụng cử động giống như xoắn ốc để bơi và xuyên qua các mô.
Kim sử dụng các hạt từ rất nhỏ để tạo nên robot và đã thử nghiệm sử dụng nam châm để đẩy microrobot qua mạch máu nhân tạo trên đĩa petri. Bằng cách tăng hay giảm cường độ của lực từ, Kim có thể điều khiển robot nhanh hay chậm. Thay đổi hướng của lực điện từ để giúp robot rẽ trái hoặc phải. Kim có thể tạo những chuỗi dài 20 đến 30 hạt từ hoặc chia nó thành nhiều chuỗi nhỏ ngắn khoảng 3 hạt. Ông nói rằng bề mặt của hạt từ có thể phủ các loại thuốc đặc hiệu. Để chữa ung thư, một microswimmer phải có kích thước khá dài để có thể xuyên qua một lớp mô dày. Sau đó nó có thể vỡ ra thành nhiều mảnh nhỏ để lan truyền thuốc sang các tế bào ung thư bên cạnh.
Tianlong Li và cộng sự cũng thiết kế một mô hình nanoswimmer rất thú vị có tên là nanofish vì chúng di chuyển giống một chú cá. Nanofish có đường kính khoảng 200 nm, dài 4,8 µm. Thân cá bao gồm phần đầu và phân đuôi tạo từ vàng, phần thân được tạo từ hai đoạn nickel và các đoạn được nối với nhau bằng các phân tử bạc. Khi đặt cá nano vào từ trường, đoạn niken từ di chuyển từ bên này sang bên kia, tác động đến phần đầu và đuôi, tạo ra chuyển động nhấp nhô đẩy cá nano về phía trước. Tốc độ và hướng của chuyển động có thể được điều khiển bằng cách thay đổi cường độ và hướng của từ trường. Chú cá này sẽ di chuyển dưới tác dụng với từ trường với tốc độ khoảng 30 µm trên giây [5].
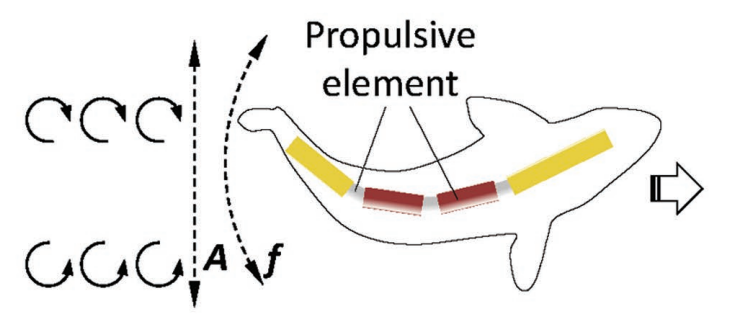
Cấu tạo của nanofish gồm phần đầu và phần đuôi bằng vàng, 2 đoạn ở thân bằng nickel và các đoạn được nối với nhau bằng bạc.
Lĩnh vực microrobot đang ở những bước đầu trong việc xây dựng thử nghiệm các mô hình và còn rất nhiều thách thức đặt ra về mặt kích thước, kĩ thuật, cũng như độ an toàn khi áp dụng trên người. Tuy nhiên, nếu nghiên cứu thành công thì cơ hội phát triển của những robot này vô cùng to lớn, nó có thể thay đổi những phương pháp trị liệu truyền thống và đem lại những hiệu quả cực kì cao.
Tác giả: Võ Thị Hạnh Đan (Đại học Khoa học Tự nhiên TP. HCM)
Tài liệu tham khảo:
1. Konkel, L., Therapeutic robots may soon swim within the body. Science News for Student, 2017.
2. Langousis, G. and K.L. Hill, Motility and more: the flagellum of Trypanosoma brucei. Nature reviews. Microbiology, 2014. 12(7): p. 505-518.
3. Korgel, B.A., Materials science. Nanosprings take shape. Science, 2005. 309(5741): p. 1683-4.
4. Huang, H.-W., et al., Soft micromachines with programmable motility and morphology. 2016. 7: p. 12263.
5. Li, T., et al., Magnetically Propelled Fish‐Like Nanoswimmers. Small, 2016. 12(44): p. 6098-6105.