
Nguồn: http://thecoolgadgets.com
Vào năm 2014, một nhóm nghiên cứu tại Học viện Hệ thống Thông minh & Robot (Institut des Systèmes Intelligents et de Robotique – ISIR), Pháp, đã tìm ra được phương pháp giúp cho robot có khả năng tự thích ứng với các hoàn cảnh khó khăn (1). Nhóm nghiên cứu đã thử đặt một robot nhện 6 chân vào các tình huống hư tổn như bị làm hỏng chân hoặc thay chân giả, sau đó áp dụng phương pháp thử và sai (trial-and-error) thông minh do họ đề ra để tạo khả năng thích nghi cho robot. Kết quả là sau một số lần chạy thử từ 1 đến 2 phút, robot bị hỏng chân đã có thể tự tìm được cách thức di chuyển tốt hơn rất nhiều so với ban đầu.
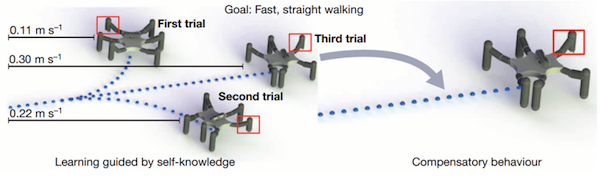
Hình 1: Mô hình các lần thử của robot nhện sau khi bị bẻ đi một chân (khoanh đỏ). Tốc độ của lần thử đầu là 0.11 m/s, lần hai là 0.22 m/s và lần ba là 0.30 m/s.
(Nguồn: nature.com)
Để có thể thực hiện được thí nghiệm trên, đầu tiên nhóm nghiên cứu dùng chương trình giả lập để mô phỏng lại khoảng 13,000 tư thế di chuyển với các hiệu suất khác nhau (đo bằng m/s). Mỗi tư thế được biểu diễn bởi 36 tham số (không gian lớn). Sau đó, họ chọn ra một không gian nhỏ hiệu quả hơn gồm 6 tham số, mỗi tham số ứng với thời gian chạm đất của một chân, thay vì dùng toàn bộ 36 tham số. Với không gian 6 chiều này, họ tạo sẵn cho robot một bản đồ hành vi-hiệu suất (behavior-performance map) để robot tìm kiếm tư thế di chuyển hiệu quả trên đó thay vì phải tìm kiếm trong không gian lớn như ban đầu. Việc này giúp đẩy nhanh quá trình thích nghi trong thực tế lên rất nhiều lần. Các kết quả thí nghiệm của nhóm tác giả cho thấy robot nhện có thể tự tìm cách đi tốt chỉ sau 3-16 lần thử, tổng thời gian cho toàn bộ các lần thử nằm trong khoảng từ 24 đến 134 giây (1).
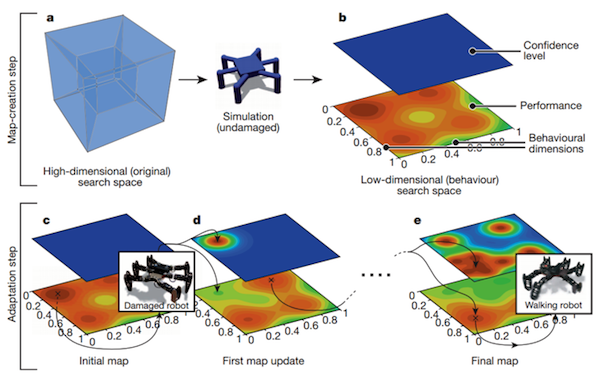
Hình 2: Hai bước chính của quá trình thí nghiệm. [a], [b]: quá trình xây dựng bản đồ trong chương trình giả lập. [c], [d], [e]: quá trình thích nghi trong thực tế của robot dựa trên bản đồ đã dựng sẵn. (Nguồn: nature.com)
Trong những tai nạn hoặc thảm họa, có một số tình huống mà các đội cứu hộ không thể cử người đến mục tiêu được vì các lí do như phóng xạ (2), lối đi quá nhỏ (3) hoặc công trình dễ sụp đổ (4). Khi đó, con người có thể trông cậy một phần ở các robot trong việc thu thập thông tin hoặc mang vật dụng hỗ trợ đến nơi người bị nạn. Tuy nhiên, các robot trước đây vẫn còn gặp khó khăn trong các tình huống phức tạp và chịu sự điều khiển của con người thay vì tự động hoàn toàn (2, 3, 4). Vì vậy, khi gặp sự cố, các robot này không còn cách nào khác ngoài việc đợi người đến sửa. Với kết quả từ công trình của nhóm ISIR, robot sẽ có thể tự thích nghi với môi trường xung quanh và với các hư tổn để di chuyển thay vì phải chờ sửa chữa. Việc này sẽ có ích rất nhiều trong công tác cứu hộ (5).

Hình 3: Robot trên mặt đất NIFTi, điều khiển bởi con người, được sử dụng trong cuộc do thám để tìm lại các di tích nghệ thuật tại Mirandola, Ý, sau trận động đất vào tháng 5/2012. (Nguồn: IEEE)
Khi công bố, phương pháp của nhóm ISIR đưa ra chỉ mới được thử nghiệm trên robot nhện 6 chân và cánh tay robot (1). Dù vậy, việc áp dụng mô hình thích nghi này vào các loại robot khác là hoàn toàn có thể (5). Vẫn còn nhiều thí nghiệm cần phải triển khai để đánh giá mô hình này, nhưng chúng ta hoàn toàn có thể kỳ vọng nhiều hơn vào vai trò của các robot cứu hộ trong tương lai (5).
Tác giả: Huỳnh Chí Kiên (ĐH Bách Khoa, Thành phố Hồ Chí Minh)
Tài liệu tham khảo
-
Cully A, Clune J, Tarapore D, Mouret J (2015): “Robots that can adapt like animals”. Nature 521:503-507.
-
Nagatani K et al. (2012): “Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots”. Journal of Field Robotics 30:44-63.
-
Davids A (2002): “Urban search and rescue robots: from tragedy to technology”. IEEE Intell Syst 17:81-83.
-
Kruijff G et al. (2012): “Rescue robots at earthquake-hit Mirandola, Italy: A field report”. 2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR).
-
Jean-Baptiste Mouret (2015): “Robots that can adapt like natural animals”. Available at: http://pages.isir.upmc.fr/~mouret/website/nature_press.xhtml [Accessed January 4, 2016].
---
Đăng ngày: 01/16/2016

Add new comment