")
Hình 1 - Mẫu xe hơi tự hành Google car - trái: Mẫu thiết kế, phải: xe tự hành Google car Lexus RX 450h SUV (Bản quyền thuộc về Google)
Những năm gần đây, thuật ngữ xe tự hành đã trở nên rất quen thuộc, có thể kể đến xe tự hành của Google (1) hay dòng xe tự lái đang chuẩn bị thương mại hóa của hãng xe Audi (2). Các hãng xe nổi tiếng đều triển khai tích hợp một số chế độ tự động cho việc điều khiển xe như khả năng tự động đỗ xe của BMW (3), chế độ lái tự động không cần người điều khiển của xe hơi tự hành Google, hay hệ thống camera - đèn xe thông minh tự động phát hiện biển báo giao thông, người đi bộ (4). Tuy nhiên, câu hỏi đặt ra là: Liệu xe tự hành đã đủ sức thay thế cho xe hơi truyền thống?
Theo Cục Quản lý an toàn giao thông đường cao tốc Hoa Kỳ - NHTSA (*), xe hơi tự hành được phân loại theo năm cấp độ sau (5): i) Không tự động (cấp độ 0): người lái hoàn toàn điều khiển tất cả các hoạt động của xe suốt thời gian vận hành; ii) Tự động theo chức năng (cấp độ 1): một hoặc một vài tính năng cụ thể của xe được vận hành tự động, ví dụ như hệ thống cân bằng điện tử của xe; iii) Chế độ tự động kết hợp (cấp độ 2): ít nhất hai chức năng điều khiển chính của xe được thiết kế tự hoạt động với nhau để giúp người lái không phải tham gia điều khiển các chức năng đó, ví dụ là hệ thống tự dẫn đường kết hợp với hệ thống canh chỉnh làn đường; iv) Chế độ tự hành giới hạn (cấp độ 3): hệ thống sẽ không thay thế người lái, mà chủ yếu là cảnh báo và hỗ trợ an toàn. Ví dụ, hệ thống sẽ cảnh báo có người đi bộ phía trước, giới hạn tốc độ tối đa, nhận diện đèn giao thông, hoặc phanh và né khẩn cấp khi có vật cản mà con người chưa kịp quan sát. Mobileye (6) là một trong số những công ty hiện nay đi đầu trong lĩnh vực này, cung cấp các sản phẩm cho các công ty lớn như Testla, BMW, GM, Volvo, Huyndai, Renault Trucks; v) Chế độ tự hành toàn phần (cấp độ 4): toàn bộ các chức năng của xe được tự động hóa, người lái chỉ cần nhập điểm đến và hướng di chuyển mà không cần tham gia điều khiển xe trong suốt quá trình xe vận hành.
Ta thấy rằng, các chế độ tự vận hành hiện nay của xe hơi (tự đỗ xe, tự giảm tốc độ khi phát hiện vật cản, tự cảnh báo khi đi lệch làn đường (7)) đều chỉ là các chế độ vận hành tạm thời - cấp độ 1 hoặc 2. Chiếc xe chỉ có thể tự điều khiển trong một khoảng thời gian ngắn trong vài phút hoặc vài giây, và người lái xe cần phải thực hiện việc giám sát chế độ tự hành của xe. Ví dụ như chế độ tự đỗ xe của BMW, tuy đã được sử dụng trong thực tế, nhưng vẫn yêu cầu người lái xe quan sát quá trình đỗ xe và can thiệp kịp thời thông qua khoá điều khiển từ xa hoặc ứng dụng điều khiển trên điện thoại.
Một chiếc xe có thể hoàn toàn tự vận hành và phản ứng với các yếu tố bất ngờ như chiếc Stanley từ Đại học Stanford chiến thắng ở cuộc thi DARPA (**) Grand Challenge 2005 (8) mới chỉ đang dừng lại ở mức nghiên cứu. Các công nghệ được trang bị cho xe Stanley (hệ thống GPS, cảm biến laser tầm gần, cảm biến RADAR tầm xa, camera độ phân giải cao) để chiến thắng cuộc đua xe tự vận hành vượt địa hình hoang mạc, nơi mà các giải thuật định hướng thông thường không còn phát huy tác dụng (không có vật mốc để xác định làn đường, không có bản đồ để định hình trước hướng di chuyển), rất khó để áp dụng đại trà. Các cảm biến sử dụng trên xe Stanley không phù hợp để lắp đặt trên các dòng xe thương mại phổ thông.

Hình 2: Xe hơi Stanley chiến thắng cuộc thi DARPA Grand Challenge 2005
(Bản quyền thuộc về Đại học Stanford)
Một chiếc xe có thể hoàn toàn tự vận hành và phản ứng với các yếu tố bất ngờ như chiếc Stanley từ Đại học Stanford chiến thắng ở cuộc thi DARPA (**) Grand Challenge 2005 (8) mới chỉ đang dừng lại ở mức nghiên cứu. Các công nghệ được trang bị cho xe Stanley (hệ thống GPS, cảm biến laser tầm gần, cảm biến RADAR tầm xa, camera độ phân giải cao) để chiến thắng cuộc đua xe tự vận hành vượt địa hình hoang mạc, nơi mà các giải thuật định hướng thông thường không còn phát huy tác dụng (không có vật mốc để xác định làn đường, không có bản đồ để định hình trước hướng di chuyển), rất khó để áp dụng đại trà. Các cảm biến sử dụng trên xe Stanley không phù hợp để lắp đặt trên các dòng xe thương mại phổ thông.
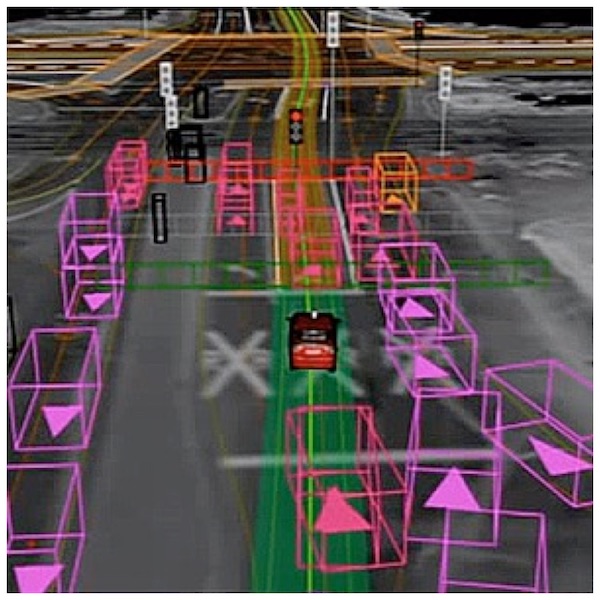
Hình 3: Xe hơi Google "nhìn" vật thể trên đường
(Bản quyền thuộc Technologyreviews)
Ngay cả đối với xe hơi tự hành Google, dù đã chạy thử hơn một triệu kilômét trong thành phố, nhưng các vấn đề mà xe hơi tự hành Google phải giải quyết vẫn còn rất nhiều, đặc biệt là việc phản ứng với người đi bộ hay cảnh sát giao thông bên lề đường vì phần mềm của xe hơi tự hành Google "nhìn" người đi bộ hay cảnh sát giao thông chỉ đơn giản là những khối ảnh di động (9)(8), do đó xe không thể phân biệt được là người đi bộ hay cảnh sát giao thông đang ra hiệu dừng xe mà thay vào đó xe sẽ tự động tránh va chạm với “khối ảnh” đấy. Thêm vào đó xe hơi tự hành Google phải dựa vào bản đồ có sẵn để có thể tự di chuyển. Các thuật toán lập bản đồ tức thời và tự định vị (SLAM) (***) không có nhiều tác dụng ở môi trường nông thôn vì ít có các điểm mốc, do đó xe không thể tự xác định được vị trí của mình. Đó là lý do tại sao xe hơi tự hành Google không thể di chuyển tốt ở khu vực nông thôn, nơi mà bản đồ địa hình chưa được thiết lập đầy đủ.
Chặng đường phía trước của chiếc xe hơi không người lái còn rất dài. Hiện nay, các chế độ hỗ trợ lái tuy đã có rất nhiều tiến bộ (chế độ cảnh báo khi đi ra khỏi làn đường hiện hữu, chế độ cảnh báo va chạm sớm, chế độ nhận dạng biển báo giao thông) (5). Mục đích mà các công ty hiện nay nhắm đến là lái 100% tự động trên đường cao tốc (loại đường giao thông rất phổ biến). thế nhưng việc đảm bảo an toàn tuyệt đối khi vận hành của xe hơi tự động vẫn còn là một dấu hỏi lớn. Hy vọng với sự hợp tác đầu tư của nhiều công ty và tổ chức nghiên cứu, tương lai của xe tự hành sẽ không còn quá xa (10).
(*) NHTSA - National Highway Traffic Safety Administration - Cục Quản lý an toàn giao thông đường cao tốc Hoa Kỳ.
(**) DARPA: Defense Advanced Research Projects Agency - Cơ quan Các dự án phòng thủ tiên tiến Bộ Quốc phòng Hoa Kỳ.
(***) SLAM - Simultaneous Localization and Mapping - Tự định vị và lập bản đồ.
Tác giả: Lê Tuấn Dũng (Nghiên cứu sinh tại Đại học Nevada, Reno, Hoa Kỳ)
Tài liệu tham khảo
----
Đăng ngày: 02/01/2016

Add new comment